Advantages
- 多様な非定型動作をロボット化: 工場・作業所・倉庫・オフィスなど、あらゆる場所にある「繰り返し行うが、人間特有の柔軟性が必要だった動作」をロボットへ置換。
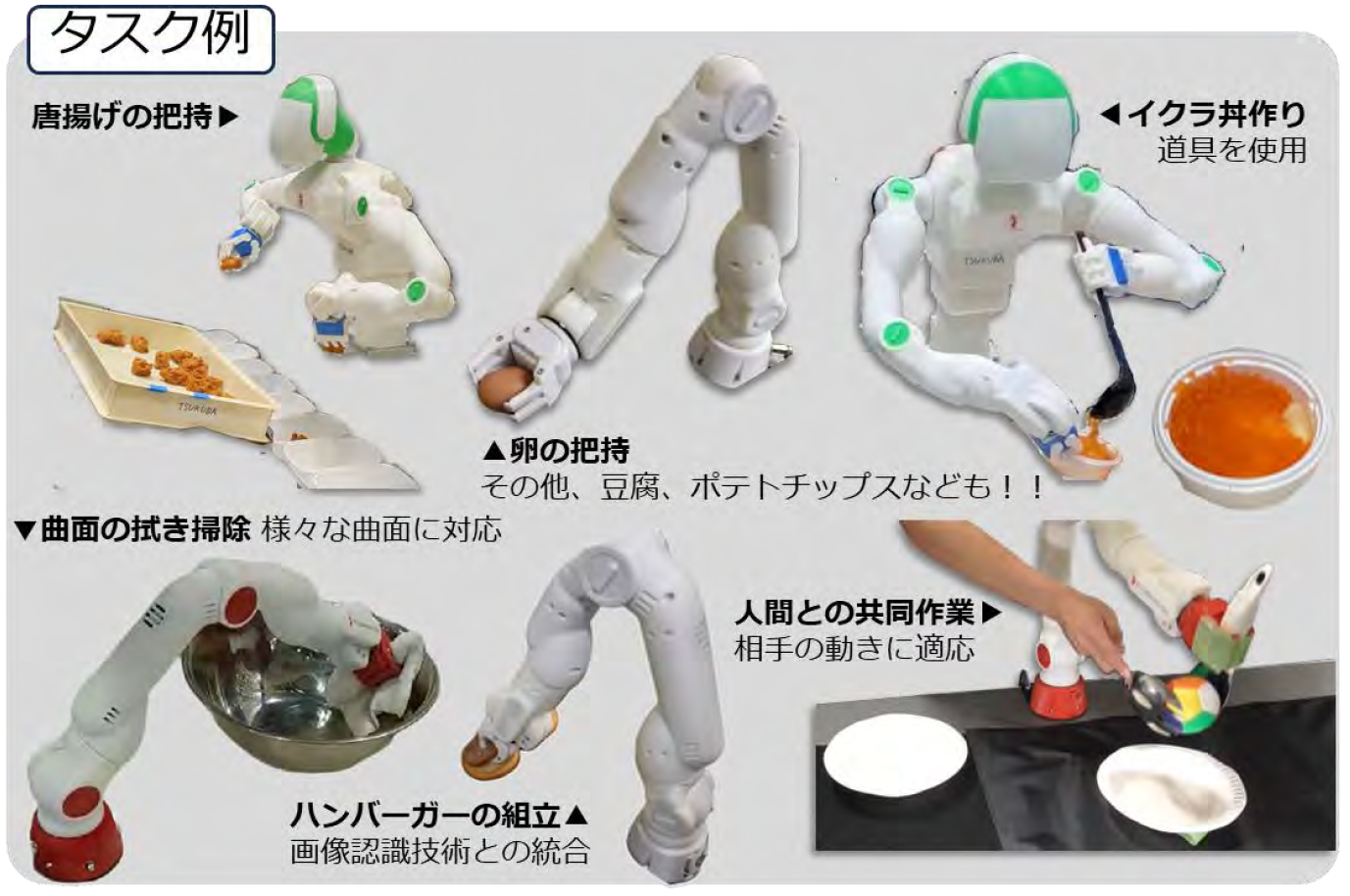
- 「硬軟」を問わない圧倒的な柔軟性: 積み木から、唐揚げ、豆腐、ポテトチップスまで。対象物の硬さや形状の個体差に合わせ、常に最適な「力加減」で把握。
- 環境変化へのリアルタイム適応: 皿やボウルを洗う際など、刻々と変わる接触面の角度や曲面に対し、逐次制御を自動生成。事前の厳密なプログラミングは不要。
- 圧倒的な低学習コスト(タイム・イズ・マネー): わずか数十回の教示(数時間)で動作を習得。従来の数日〜数週間におよぶ教示期間を劇的に短縮し、導入のハードルを解消。
Background and Technology
従来の産業用ロボットは、決められた軌道を精密に繰り返す「定型作業」には長けていますが、対象の位置ずれや形状差といった「環境の変化」には弱く、その対応コストが自動化の壁となっていました。
筑波大学の境野准教授は、「バイラテラル制御」と「深層学習」を高度に融合した革新的なロボット技術を開発しました。この技術は、ロボット自身が環境の変化を察知し、アームの位置・角度・握る力をリアルタイムに自律制御する「これまでにない柔軟性」を誇ります。
【実証済みの実力:イクラ丼の成功】
例えば「お玉でイクラをすくい、丼によそう」動作。人間には容易ですが、ロボットにとっては「道具(お玉)の保持」「不定形な粒状の対象(イクラ)のすくいあげ」「こぼさない移動と傾け」のすべてが極めて困難です。過去の技術コンテストにおいて、この一連の動作に成功したのは境野研究室のチームのみでした(本記事中の動画をご覧ください)。
【技術面の核心:触覚を学習するAI】
バイラテラル制御により、人間が操作した際の「手ごたえ(反力)」をロボットが直接学習します。人間が無意識に行っている「力加減のコツ」をデータ化し、深層学習に組み込むことで、触覚フィードバックに基づいた動作補正が可能になりました。これにより、高価な位置決め装置や専用の治具に頼らない、汎用性の高い自動化を実現しています。

Current Stage and Key Data
【Current Stage】
ラボ環境において、以下の多様な実動作の再現性を確認しています(下記動画参照)。
【Data】
■開発者のよるプレゼンテーションを動画でご覧いただけます。
動画 https://youtu.be/VJL_bCvalPM
動画中の資料 https://shingi.jst.go.jp/list/list_2025/2025_tsukuba.html#20250916P-004
■イクラ丼づくり(動画):https://x.com/shosakaino/status/1791824179299561683
■本技術で可能となる動作の説明動画:https://www.youtube.com/watch?v=-S9f0I-QvDU
上記動画では以下の動作をご覧いただけます。
・つまむ:唐揚げ、生卵、豆腐、ポテトチップス等の把持、ハンバーガーの調理(パテをバンズにはさむ)
・こする:消しゴムでの筆記消去
・ぬぐう:ホワイトボード清掃、ボウルなどの曲面拭き、ブラシを使ったトイレ掃除
・すくう:お玉を使ったイクラ丼づくり、パンケーキの盛り付け
・人間とロボットの協調動作:人間の力加減に合わせた物体の共助・運搬
Partnering Model
筑波大学では、本技術の社会実装を共に行うパートナー企業様を募集しています。
・課題解決の提案:深刻な人手不足の解消、あるいは過酷・危険な作業の代替など、貴社の具体的な課題に対し、本技術がどう貢献できるかを共に検討します。
・柔軟な開発体制: 共同開発のご相談を承ります。筑波大学にて実機をご覧いただき、性能を体感していただくことが可能です。
・秘匿性の確保: 必要に応じて秘密保持契約(NDA)を締結した上で、研究者との詳細な技術相談・コンサルティングを実施いたします。
Principal Investigator
境野 翔 准教授(筑波大学 システム情報系)
Patents and Publications
Patent:WO2025/258322A1, WO2025/263185A1