Advantages
- Automating a Wide Range of Unstructured Operations:
Replacing repetitive tasks that previously required human-like flexibility with robots in any environment, including factories, workshops, warehouses, and offices.
- Unrivaled Flexibility Across Hard and Soft Materials:
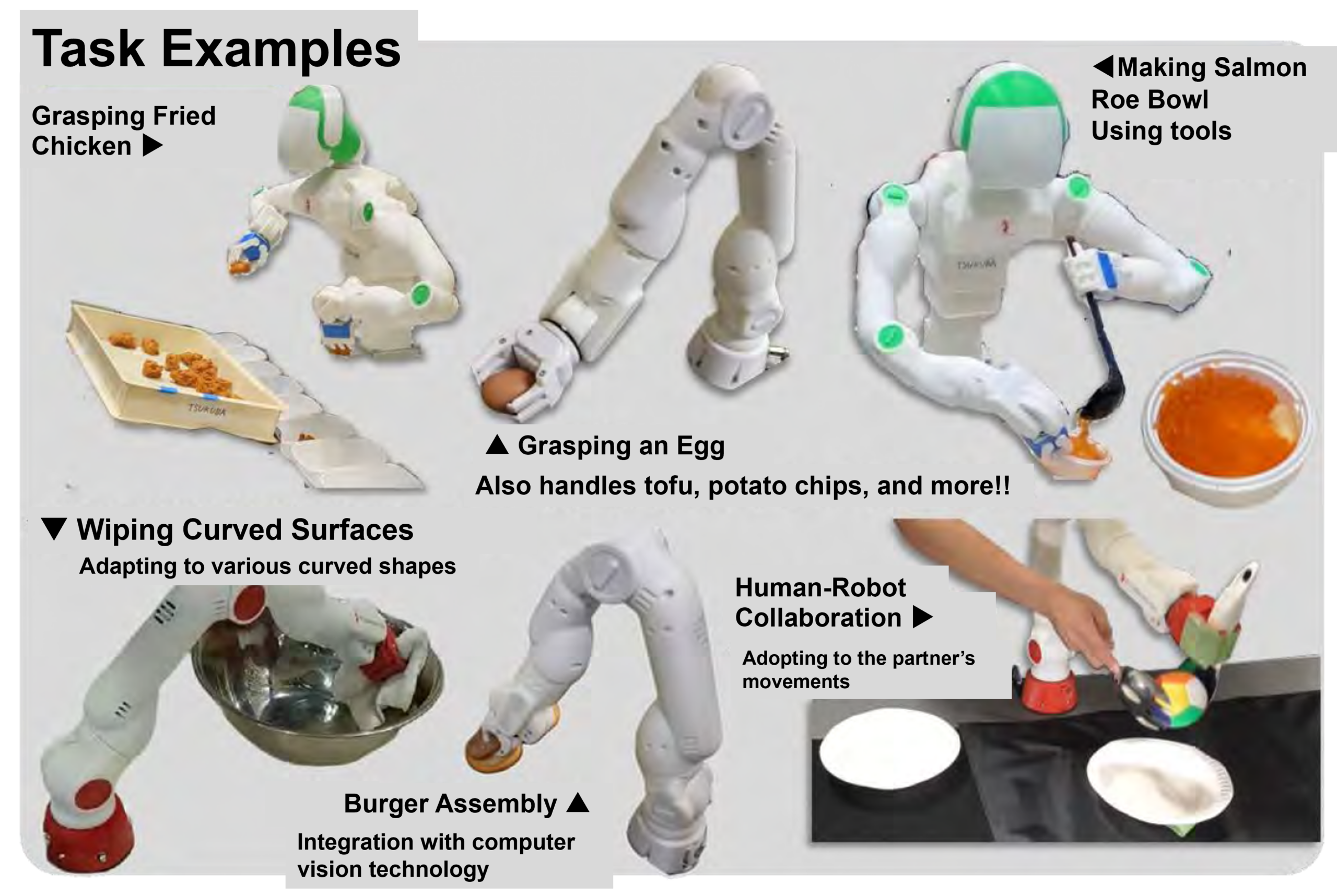
From toy blocks to fried chicken, tofu, and potato chips. The system consistently applies the optimal gripping force, adapting to individual differences in hardness and shape.
- Real-Time Adaptation to Environmental Changes:
Automatically generating sequential control on the fly for ever-changing contact angles and curved surfaces, such as when washing plates or bowls. No precise pre-programming required.
- Overwhelmingly Low Training Cost (Time is Money):
Tasks are mastered with just dozens of demonstrations (taking only a few hours). This dramatically reduces the conventional training period—which usually takes days to weeks—thereby eliminating barriers to adoption.
Background and Technology
While conventional industrial robots excel at routine tasks that involve precisely repeating pre-determined trajectories, they are vulnerable to environmental changes such as positioning deviations and variations in target shapes. The cost of addressing these variations has long been a significant barrier to automation.
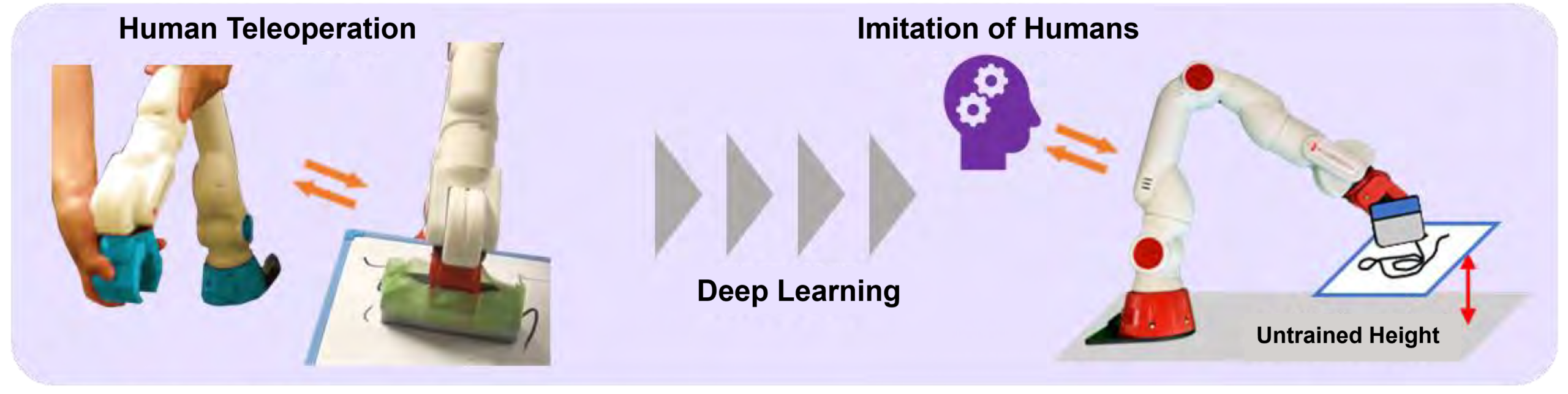
Associate Professor Sho Sakaino at the University of Tsukuba has developed an innovative robotic technology that highly integrates bilateral control and deep learning. This technology boasts "unprecedented flexibility," enabling the robot itself to perceive environmental changes and autonomously control the position, angle, and gripping force of its arm in real time.
[Proven Capability: Success with the Salmon Roe Bowl (Ikura-don)]
For example, the action of scooping salmon roe with a ladle and serving it over a bowl of rice. While easy for humans, every step is extremely difficult for a conventional robot: holding the tool (ladle), scooping an unstructured, granular object (salmon roe), and moving/tilting it without spilling. In a past technology contest, the team from Dr. Sakaino's laboratory was the only one to successfully perform this sequence of actions (please see the video in this article).
[Core Technology: AI that Learns the Sense of Touch]
Through bilateral control, the robot directly learns the feedback force (reaction force) experienced when a human operates it. By converting the knack of force adjustment that humans perform unconsciously into data and incorporating it into deep learning, the robot can correct its movements based on tactile feedback. This achieves highly versatile automation without relying on expensive positioning devices or dedicated jigs.
Current Stage and Key Data
[Current Stage]
We have verified the reproducibility of the following diverse real-world operations in a laboratory environment (see the videos below).
[Data]
- Making a Salmon Roe Bowl (Video): https://x.com/shosakaino/status/1791824179299561683
- Explanatory video of actions enabled by this technology: https://www.youtube.com/watch?v=-S9f0I-QvDU
The video demonstrates the following actions:
Pinching / Grasping: Gripping fried chicken, raw eggs, tofu, potato chips, etc.; cooking hamburgers (placing patties onto buns).
Rubbing: Erasing handwriting with an eraser.
Wiping: Cleaning whiteboards, wiping curved surfaces like bowls, and cleaning toilets with a brush.
Scooping: Making a salmon roe bowl using a ladle, and plating pancakes.
Human-Robot Collaboration: Co-assisting and transporting objects in accordance with human force adjustments.
Partnering Model
The University of Tsukuba is currently seeking partner companies to collaboratively advance the social implementation of this technology.
- Proposing Solutions: We will work together to explore how this technology can address your specific challenges, such as resolving severe labor shortages or replacing harsh/hazardous tasks.
- Flexible Development Framework: We welcome inquiries regarding joint development. You can view the actual machinery and experience its performance firsthand at the University of Tsukuba.
- Ensuring Confidentiality: If necessary, we can conduct detailed technical consultations and counseling with researchers after executing a Non-Disclosure Agreement (NDA).
Principal Investigator
Associate Professor Sho Sakaino (University of Tsukuba)
Patents and Publications
Patent:
WO2025/258322A1
WO2025/263185A1
These patent applications are published in Japanese. Please use machine translation or other tools to read them as needed.